DroneSwarm
实现多机协同实时二三维重建、目标识别定位与跟踪的边缘智能无人机集群系统,依托 “灵蜂 - 固定翼” 与 “猎翼 - 旋翼” 双产品线,通过统一指挥中枢、智能边缘计算构建 “侦察 - 处置 - 分析” 一体化作业生态,具备线边缘部署、异构多机协同、资源优化等优势,可覆盖军用侦察、应急救援、城市测绘等全场景。
DroneSwarm系统架构
DroneSwarm 以 “机载端实时处理 + 地面端智能管控” 为核心,搭建多层级、高可靠的系统架构,实现通导控一体化与全流程闭环作业。

五大核心功能——重塑空间数据采集与处理效率
-
大范围协同测绘规划
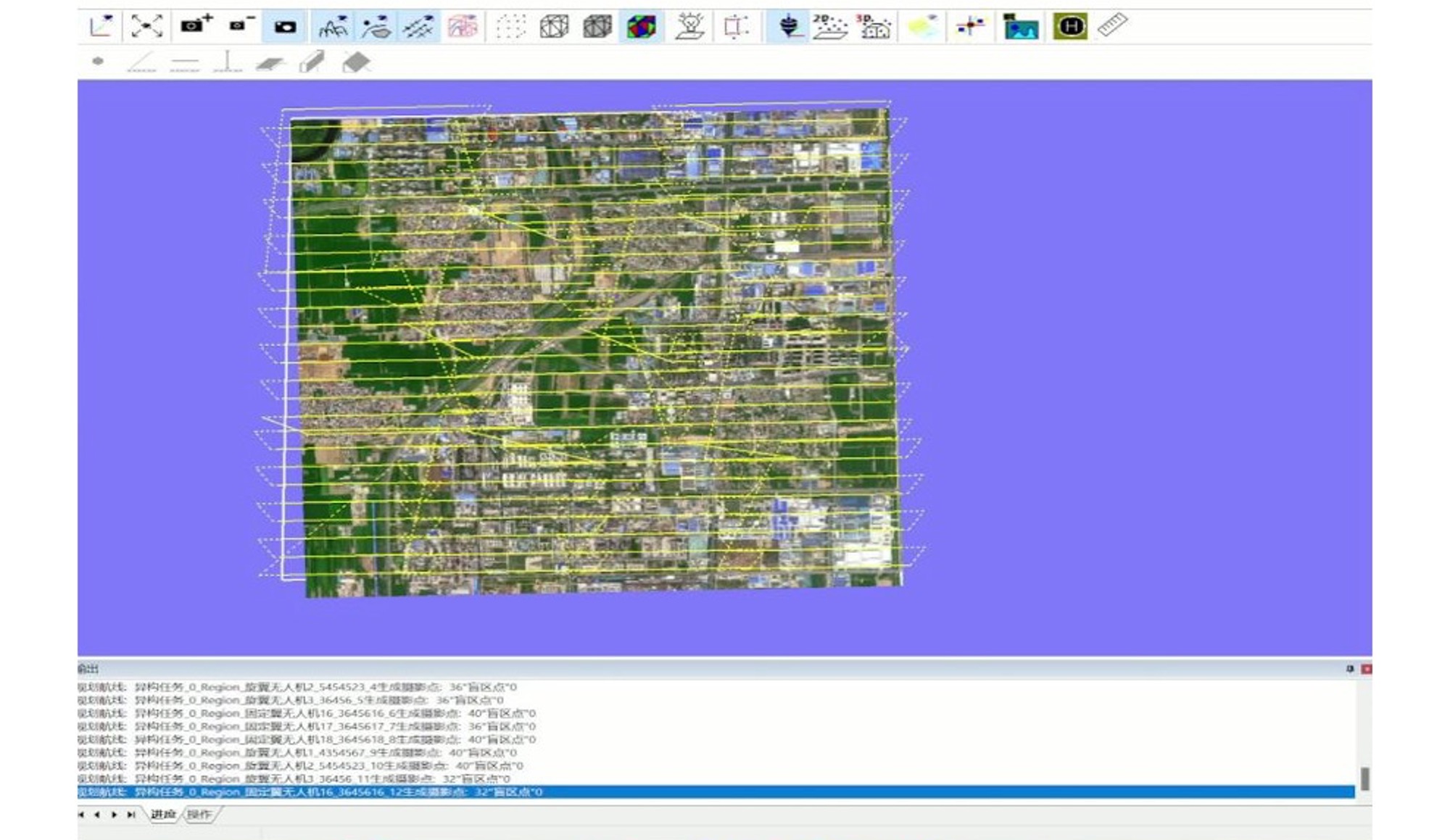
智能调度:支持多旋翼 / 固定翼 / 混合编队统一调度,自适应多维度任务场景;
智能规划:基于无人机性能与环境感知,自主生成最优飞行路径,动态优化航速、航高与覆盖密度,支持突发场景下的任务重规划与机群再编组;
高效测绘:基于区域地形特征、无人机性能和资源智能分区,动态适配机型资源,优化航线重叠度,保障大范围作业效率。
-
大范围协同测绘规划
-
超大场景协同作业

-
多无人机协同实时正射成图

实时输出:边飞行-边处理-边传输,飞行中同步完成影像处理与 DOM 生成,消除返航后处理环节,实现 0 延时成果交付;
高精度保障:通过嵌入式整体光束法平差技术,校正影像阴影、重叠与畸变,达成厘米级全域精度;
通信优化:仅回传处理后成果数据,链路负载降至传统模式的 1%,适配恶劣 / 远距离通信环境。
-
超大场景协同作业
-
多无人机协同实时正射成图
-
大规模快速三维建模

-
重点目标精细三维建模

快速建模:多机协同采集+分布式并行计算,不限航摄面积,任务结束后 10 分钟内完成大范围三维建模;
精细还原:针对重点目标实现多角度贴近摄影,厘米级特征还原,支持地形跟随与遮蔽补偿拍摄;
双模运行:支持实时在线/离线模式切换,断网时自动启用缓存影像持续作业,确保复杂环境不中断。
-
大规模快速三维建模
-
重点目标精细三维建模
-
快速三维重建

高效实时:分布式渲染架构,支持 4K 与 1080p 分辨率下的连续场景实时渲染,大幅缩短传统建模耗时;
视觉保真:精细化纹理重建,突破传统 mesh 模型局限,保障从设施细节到地形宏观的视觉连贯性,适配复杂光照与几何条件;
交互适配:满足动态监控、虚拟仿真、项目演示等实时交互场景需求。
-
快速三维重建
-
时敏目标识别
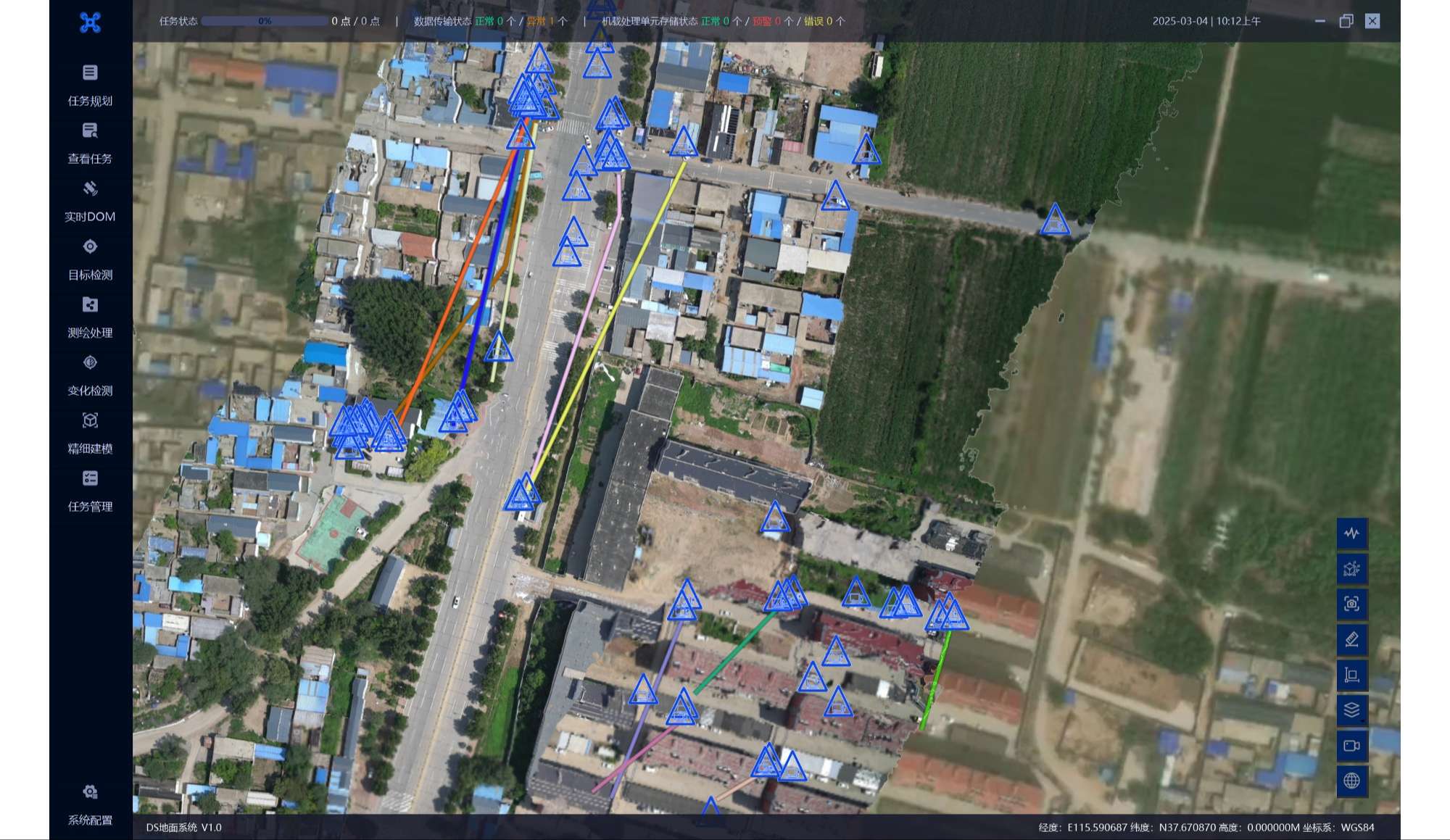
-
时敏目标轨迹
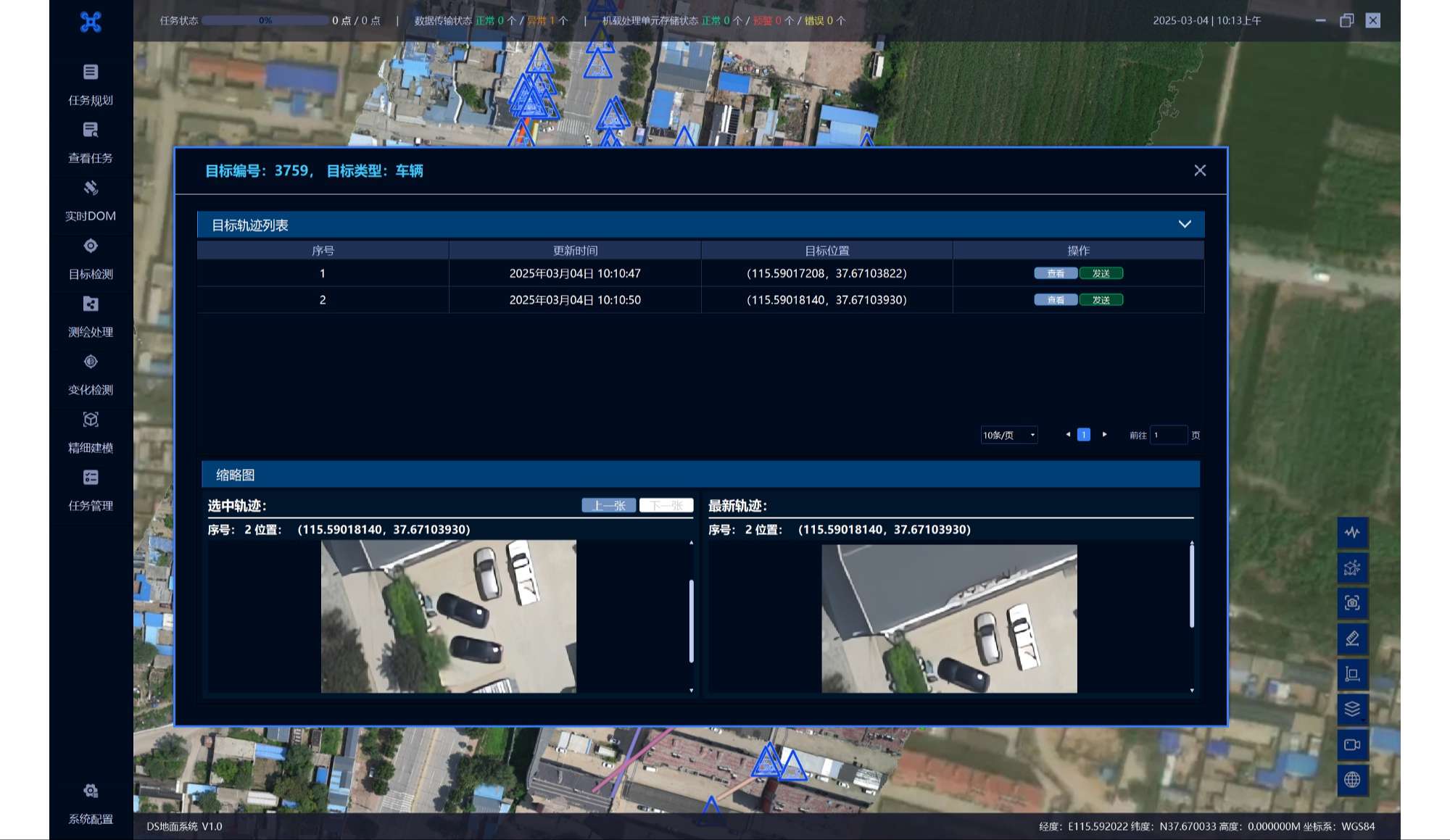
-
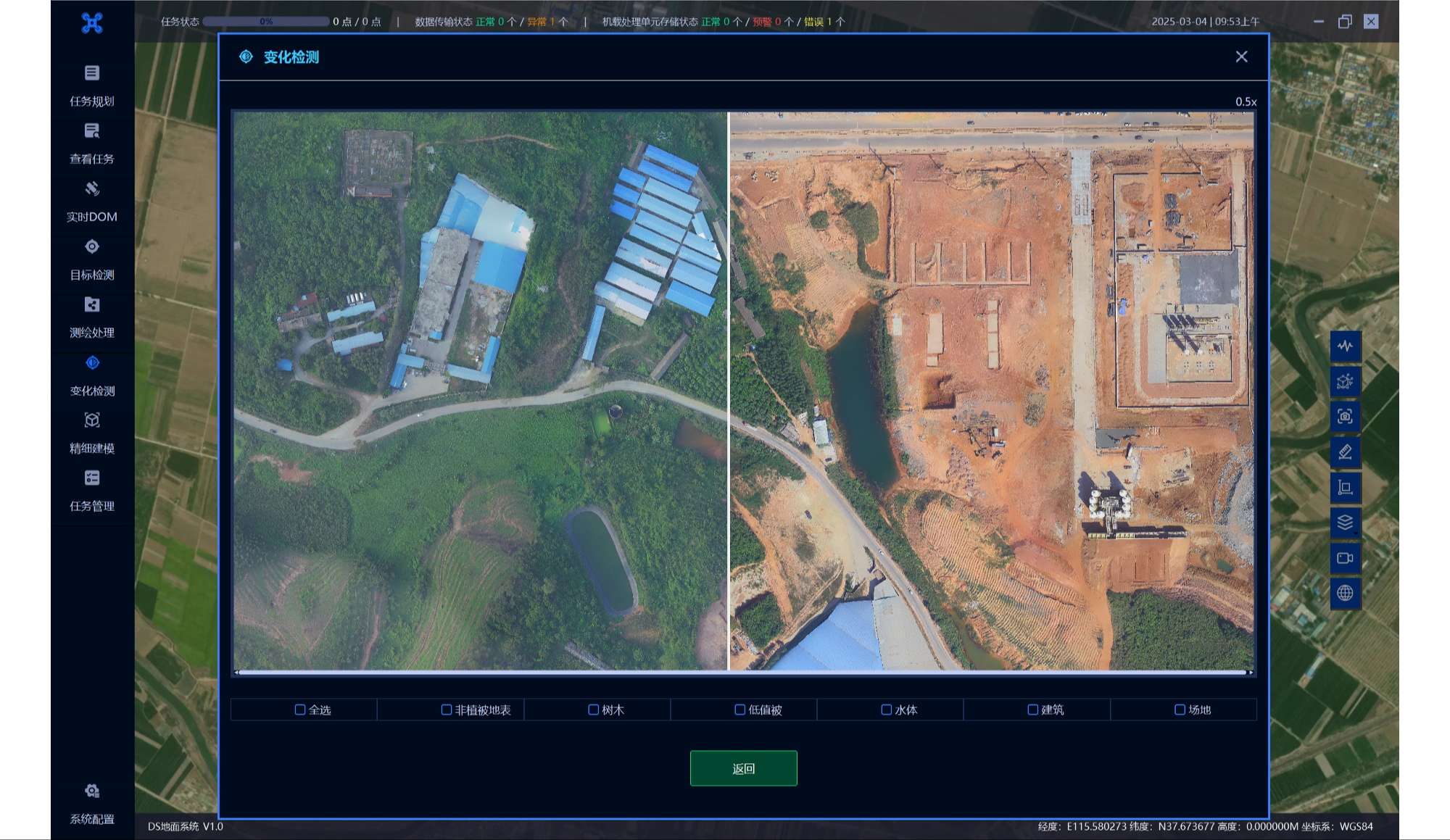
变化检测-两期对比影像
多类型识别:精准识别人员、车辆、舰船等时敏目标,道路、桥梁、建筑等静态目标,以及水体、植被等环境要素,识别精度超 90%;
亚米级定位:GPS + 视觉 SLAM 实时解算,城市密集区与偏远地带定位精度<1 倍 GSD,支持动态目标持续追踪与坐标回传;
变化检测:通过多期 DOM 与三维模型比对,自动识别新建建筑、道路变更等变化,像素级准确率超 95%。
-
时敏目标识别
-
时敏目标轨迹
-
变化检测-两期对比影像
DroneSwarm的广泛应用
异构无人机蜂群协同侦查,实时生成战场三维态势图,精准识别跟踪时敏目标,为战术决策提供无通信依赖的高效数据支撑。

灾害现场 0 延时实时成图,精准定位被困人员与损毁目标,断网环境下持续作业,助力救援高效开展。
-
 大范围测绘与地理信息更新
大范围测绘与地理信息更新支持超大区域协同测绘,以厘米级精度满足国土调查与城市规划需求,动态监测地理要素变化并自动更新。
-
安防监控与设施管护
重点区域动态巡逻识别异常目标并推送预警,为电力、油气等设施提供精细化三维建模与运维支撑。
-
 环境监测与保护
环境监测与保护持续监测自然保护区和生态系统的变化,自动采集关键环境数据,评估环境影响和保护成效。提供关键环境数据,通过智能分析评估环境影响,为自然资源的可持续管理提供科学依据。
-
军事侦查与策略
异构无人机蜂群协同侦查,实时生成战场三维态势图,精准识别跟踪时敏目标,为战术决策提供无通信依赖的高效数据支撑。
-
应急响应与救援
灾害现场 0 延时实时成图,精准定位被困人员与损毁目标,断网环境下持续作业,助力救援高效开展。
-
大范围测绘与地理信息更新
支持超大区域协同测绘,以厘米级精度满足国土调查与城市规划需求,动态监测地理要素变化并自动更新。
-
安防监控与设施管护
重点区域动态巡逻识别异常目标并推送预警,为电力、油气等设施提供精细化三维建模与运维支撑。
-
环境监测与保护
持续监测自然保护区和生态系统的变化,自动采集关键环境数据,评估环境影响和保护成效。提供关键环境数据,通过智能分析评估环境影响,为自然资源的可持续管理提供科学依据。